
Anybody who’s ever used a trail camera knows how much fun they can be. It’s amazing what goes on in the woods when you’re NOT there. But trail cams aren’t just for scouting.
Camera traps are one of the coolest ways for researchers to study wildlife. You not only get really interesting data—pictures and videos of animals doing their thing!—they are relatively cheap, you don’t have to bother animals (remember those VITs!), and they can tell you a number of things about wildlife like when they’re active, where they are, and what habitat they use.
Mapping where a species can be found is particularly useful. The fancy term for it is Occupancy Modeling. Researchers estimate the probability that a site is occupied, which tells you what proportion of your study areas is occupied by the species of interest.
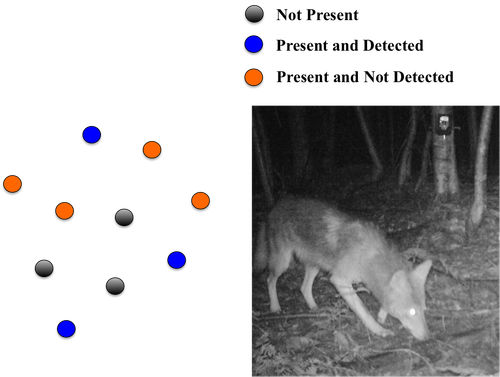
Let’s say we are all about coyotes.
Occupancy probability takes into account that while a coyote is present in the area of a camera station, you might not see it (because it’s not feeling photogenic).
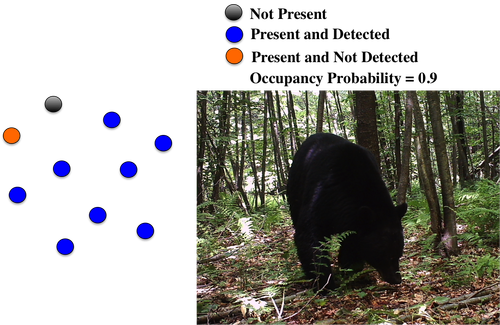
For example, we set out 10 camera stations (each camera station is represented by a circle in the figure below). Either we detect a coyote or not at each station.
If we detect coyotes at 3 of 10 stations (naive occupancy = 0.3) we know that at least 30% of the study area has coyotes… but it might be more (we call the proportion of stations where coyotes were detected, 3 of 10 or 0.3, “naive occupancy” because it does not account for detection probability).

What we would really like to know is the proportion of the study area where coyotes occur. That means we need to account for the probability of detecting an animal to estimate what proportion of stations coyotes are present even though we failed to detect them!
For example, true occupancy is the proportion of stations where coyotes were present whether detected or not (the orange and blue stations in the figure below).
Below are some examples of naive occupancy from a small part of our data from the Bald Eagle State Forest. At ten camera stations, we tracked whether we saw deer, black bear, gray fox, coyote, and bobcat.
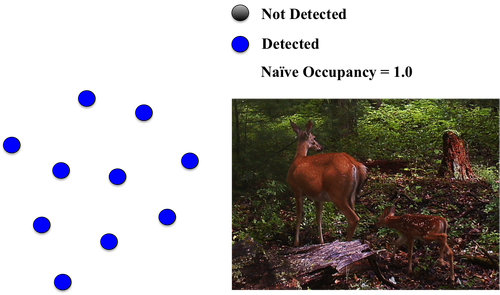

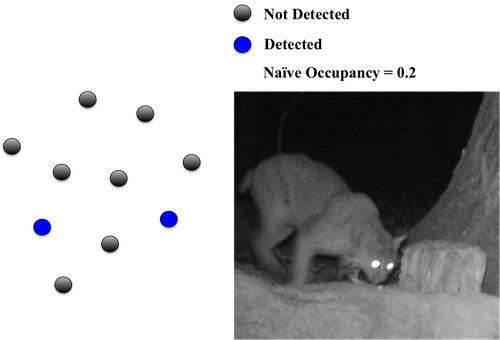
We can easily see that deer and black bears are present at more camera stations than bobcats or gray foxes. However we haven’t taken into account the camera stations where a species could have been, but just wasn’t detected.
In order to get a true picture of occupancy, we need to factor in detection probability. Detection probability is estimated by looking at the capture histories over time and space.
Each camera station has its own ‘capture history’, which is simply a record of each day when we detected a bear (=1) or not (=0). For example, our capture histories for bears at 10 camera stations might look like this:
| Camera | Capture history |
|---|---|
| 1 2 3 4 5 6 7 8 9 10 |
1000001010 0000010001 0011001000 1010100000 1111000011 0000000000 1000000110 0010110000 1100000101 0000000000 |
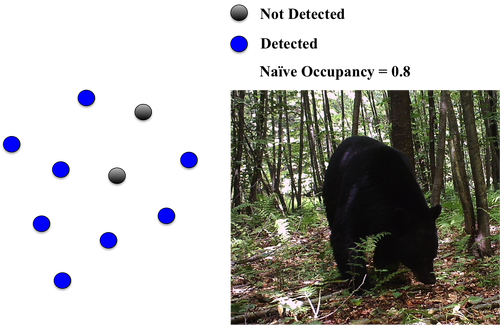
So let’s look at bear occupancy, this time with detection taken into account:
Our naïve occupancy estimate (that does not include detection) is 0.8 which is close to our true occupancy estimate (with detection) of 0.9. This means we have a high bear detection probability. If there was a bear at a camera station, chances are it actually showed up on the camera. But still, from our analysis we would not expect to detect a bear at 1 in 10 stations, or 10% of the area. Without doing our analysis, we would have underestimated occupancy.
In the future, we will be running occupancy analyses for multiple carnivore species and deer at over 100 camera stations across three study sites. With these analyses, we’ll look at habitat use and whether the presence of one carnivore species—say coyote—influences the presence of another carnivore – like fox.
And you thought trail cams were just a fun toy!
Ph.D. graduate student
If you would like to receive email alerts of new blog posts, subscribe here.
And Follow us on Twitter @WTDresearch